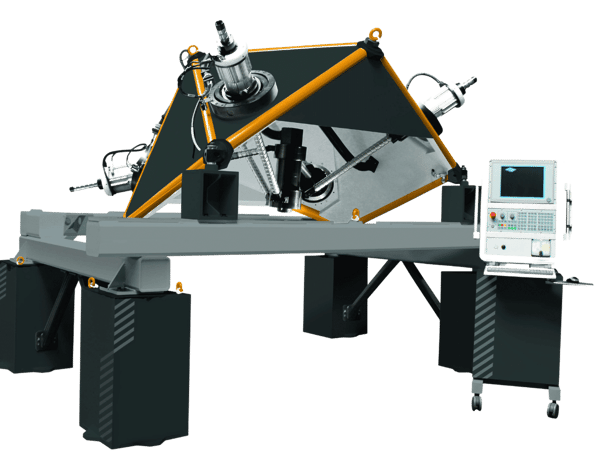
Parallel Kinematik
Es ist mehr als nur ein Projekt, ich betrachte es als eine bedeutende Leistung. Auch wenn es schwierig war, sehe ich es als meine beste Arbeit an, denn niemand hatte es zuvor getan, und die Erfolgschancen waren fast gleich Null, als ich anfing. Die Entwicklung der Simulation für eine 5-Achsen-Pentapod-Maschine war eine unglaublich komplizierte Aufgabe. Um die Bewegung dieser Stangen durch programmierten G-Code zu ermöglichen, war die Entwicklung einer inversen Kinematik zur Steuerung aller Stangen und Komponenten erforderlich.
Ich bin folgendermaßen vorgegangen: Ich konstruierte die Kinematik der Maschine in NX, indem ich die komplexe geschlossene kinematische Kette in mehrere offene kinematische Ketten zerlegte. Die mathematischen Aspekte der inversen Kinematik der Stangen wurden mit Python entwickelt. Während des Betriebs der Maschine in der CAM-Umgebung wurden die Ausgabewerte dieser Python-Berechnungen mithilfe von NX CSE für jede G-Codezeile in NX integriert. Folglich bewegte sich jedes Bauteil gemäß den von Python generierten Ausgabewerten, was zu einer nahtlosen Synchronisierung der Maschine durch die Synergie von Python, NX-Konstruktion und NX CSE Simulation führte.
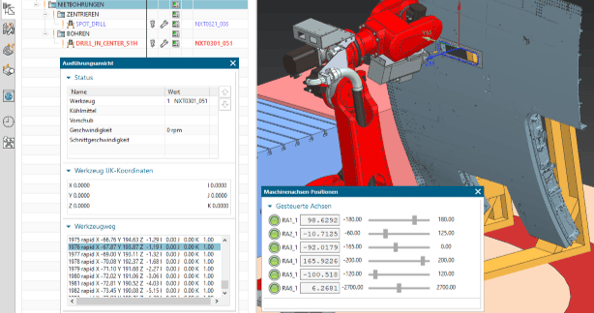
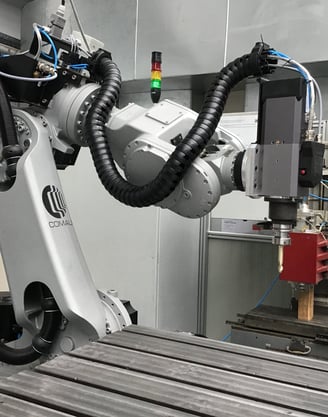
RoKoPro
Funktionsintegrierte Roboter-Maschinen-Werkzeugsteuerung für die kooperative Produktion

Oboe maschine
Jeder, der sich mit Musik auskennt, erkennt das angezeigte Bild, bei dem es sich um ein Mundstück handelt. Die Mundstücke werden, wie im Video gezeigt, mit einer Vorrichtung manuell profiliert. Um diesen Prozess zu automatisieren, haben wir in Zusammenarbeit mit dem Institut für strukturellen Leichtbau der TU Chemnitz eine kompakte Maschine für diesen Zweck entwickelt. Unser Team war für die Erstellung der wesentlichen Komponenten, die CAM-Programmierung und die digitalen Modelle verantwortlich. Umfangreiche Tests wurden an der Universität durchgeführt. Leider kann ich aufgrund einer Geheimhaltungsvereinbarung (Non-Disclosure Agreement, NDA) hier keine Bilder der Maschine zeigen.